








未来战场新常态:有人/无(wú)人机协同作(zuò)战
摘 要:有人/无人机(jī)协同将(jiāng)成为无人平(píng)台在(zài)未来战场运用(yòng)的(de)新(xīn)常态。随着武器装(zhuāng)备的智能化、自主化(huà)水平不(bú)断提(tí)高,人与机(jī)器之间的任务剖分会发生明显改变,人会逐渐把大量重复且确定的工作交给机器(qì)完(wán)成,而自(zì)己只参与重要决策环节(jiē)。有(yǒu)人/无人机(jī)协同作战是分布(bù)式协同作战理念指导下应用较为广泛的典型(xíng)作(zuò)战模式,通过有人(rén)平(píng)台(tái)和无人机之(zhī)间分工协作(zuò),形(xíng)成优势互补,达到“1+1>2”的作战效(xiào)果(guǒ)。本文对近些年(nián)美军在(zài)有(yǒu)人/无人(rén)机协(xié)同领域的项目进行深(shēn)入(rù)分析,总结了有人/无人机协(xié)同需要发展的关键技术,并对有人/无人(rén)机协同作战的典型作战场(chǎng)景和(hé)作(zuò)战流程进行研究(jiū),提出对有人/无人机协同作战领域未来发展的思考(kǎo)。
关键词(cí): 有人/无人协同(tóng);无(wú)人机(jī)
引 言
有(yǒu)人/无人机(jī)协同作战是将体系能力分散到有人和无人平台之上,通过体系内各平台之间的协同工作,一方面(miàn)使作战能力(lì)倍增,另一(yī)方面利用无(wú)人机实现对有人机(jī)的保护,大幅提高体系的抗毁伤(shāng)能(néng)力和鲁棒性。有人/无人协同作(zuò)战能够实现有人和(hé)无人平台之间的(de)优势(shì)互(hù)补,分工协作,充(chōng)分发(fā)挥各自平台能力,形成“1+1>2”的(de)效(xiào)果(guǒ)。有人(rén)机与无人(rén)机(jī)在空(kōng)中作战将(jiāng)长(zhǎng)期保持控制与被控制的关系[1],随着无人智能化(huà)水(shuǐ)平的不断发展,有人机与无人机协同作战样式、协同形态和相关技术也在不断(duàn)演进。因(yīn)此,发展有人/无人机协同编队(duì)提高(gāo)作战效能(néng)是现阶段的明(míng)智(zhì)选择(zé)。
本文主要(yào)研(yán)究美军在有人(rén)/无人机协(xié)同(tóng)领域的项目(mù)和(hé)技术突破(pò)情况,给出对于有人/无人机未来发展的思考。本文组织结构如下(xià):第1章(zhāng)对美军(jun1)近些年在有(yǒu)人/无人机协同方向典型项(xiàng)目进行重点分析;第2章主要介绍(shào)了有人/无人机(jī)协(xié)同(tóng)的(de)关键技(jì)术(shù);第3章是有人/无人机典型作战场(chǎng)景(jǐng)和场(chǎng)景(jǐng)模式(shì);第(dì)4章是(shì)对有人/无人协同未来(lái)发展方向的(de)展望(wàng);最后对本文进行总结。
1 美军有人/无人机协同发展现状分析
美军将有人/无人(rén)协同列为“第三次抵消战略”五大关键技术领域之一。有人/无人协同概念最早(zǎo)出现(xiàn)于上世纪60年代,指(zhǐ)有人与无(wú)人系(xì)统(tǒng)之间(jiān)为实现共同作战任务(wù)目标(biāo)建立起联系,用于(yú)描述平台(tái)互(hù)用性和共享(xiǎng)资(zī)产控制(zhì)。近些年,DARPA及各(gè)军兵(bīng)种在(zài)有人/无人(rén)机协(xié)同领域开展了大量研究(jiū)工作,主要从体系架(jià)构、指挥控(kòng)制、通信组(zǔ)网以及人机交互四个方面重点发展(zhǎn)。
1.1 体系架构
为(wéi)了探索确保美国空中优势(shì)的新(xīn)方法(fǎ),2014年,DARPA发布体系集成技(jì)术和试验(SoSITE)项目公告。该(gāi)项目(mù)目标是探索一(yī)种更新、更(gèng)灵活的(de)方式,将单(dān)个武器系统的能力分散到多(duō)个有人与无人平台、武(wǔ)器上,寻求(qiú)开发并实现(xiàn)用于新技术快速集成的系统架构概念(niàn),无需对现有(yǒu)能(néng)力、系统或体系进行大规模重(chóng)新设计。SoSITE项目计划(huá)运用开放式系(xì)统架构方法,开发(fā)可无缝安装、即装即(jí)用,并能(néng)快速完成现代化升(shēng)级的、可(kě)互换的模块和(hé)平台,使(shǐ)得新技术的集(jí)成整合(hé)更容易(yì)、更快速。如(rú)图1所示,通过开(kāi)放式系统架构方(fāng)法实现空中平台(tái)关键功能在(zài)各(gè)类有人/无人平台间(jiān)的分(fèn)配(pèi),包括电(diàn)子战、传感(gǎn)器、武器系统、作战(zhàn)管(guǎn)理(lǐ)、定位导(dǎo)航与授时以及数(shù)据(jù)/通信链等功能。

图(tú)1 SoSITE概念图
2017年(nián),美军在SoSITE分布(bù)式发展思路(lù)的基础上,进(jìn)一步提(tí)出了(le)“马赛克战”的概(gài)念,更加(jiā)强调不同平台之间动态协同,从平台和关键子(zǐ)系统的(de)集成转变为战斗网络(luò)的连接、命令与控制。通过将各(gè)类传感(gǎn)器、指挥(huī)控制系统、武器(qì)系统(tǒng)等比作“马赛克碎(suì)片”,通过通信(xìn)网络将各个(gè)碎片之间进行铰(jiǎo)链,形成(chéng)一个灵活机(jī)动的作战体系,解决传(chuán)统装备研发和维护成本高、研制(zhì)周期长的(de)问题。
1.2 指挥控(kòng)制
针对有人/无人机(jī)协同的指(zhǐ)挥控制(zhì),美军重点(diǎn)研究(jiū)强对(duì)抗/干扰(rǎo)环境下的有人机与无(wú)人机(jī)协(xié)作执行任务的方法,形成分(fèn)布式(shì)的指控管(guǎn)理能力。
2014年,DARPA提出“拒止环境中协同作(zuò)战”(CODE)项(xiàng)目(mù)。“CODE”的目标是使配备“CODE”软件的无(wú)人机群在一名有人平台上(shàng)任务指挥官的全权监管下,按照(zhào)既定交战(zhàn)规则导航到(dào)目(mù)的地,协作(zuò)执(zhí)行寻找、跟(gēn)踪(zōng)、识(shí)别(bié)和打(dǎ)击目标的任务[2,3]。CODE项目通过开(kāi)发先进算(suàn)法和软件,探索分布式作战中无(wú)人机的自主和(hé)协同技术,扩(kuò)展(zhǎn)美军(jun1)现有无人机系统在对抗/拒止作(zuò)战空(kōng)间与(yǔ)地面、海上高机动(dòng)目标展开动态远(yuǎn)程交战的能力(lì)。
CODE项目分为(wéi)三个阶段(duàn),
第一阶段从2014年到2016年年初,内容包(bāo)括系统分(fèn)析(xī)、架构设计(jì)和发展关键技(jì)术,完成系统需求定义(yì)和初(chū)步(bù)系统设计;
第二阶段从2016年年初(chū)到2017年年中,洛马和(hé)雷神公司(sī)以RQ-23“虎鲨”无人机为测试平台,加装相(xiàng)关软硬件,并开展(zhǎn)了大(dà)量飞行试验,验(yàn)证了开发式架构、自主协同规划(huá)等指标(biāo);
第三(sān)阶段从2018年1月开始,测试使用6架(jià)真实无人机以(yǐ)及模(mó)拟(nǐ)飞机的协(xié)同能(néng)力,实(shí)现单人指挥无人机小组(zǔ)完成复(fù)杂(zá)任务。

图2 “拒止环境中协同(tóng)作战”项目
2014年,DARPA提出“分布式战场管理”(DBM)项(xiàng)目。项目背景(jǐng)是未(wèi)来(lái)的对抗性空域,协同(tóng)作(zuò)战的(de)飞机可能需要限制通信以(yǐ)免被对手发现,或者会被对(duì)方干扰而无法交换信息,这将(jiāng)严重影响有人(rén)/无人编队作战能力,为此,DBM项目的目标是使(shǐ)作战编(biān)队即使在受(shòu)到干扰(rǎo)的情况下也能继续执行任务。
- 2014年启动第一阶段,通过发展先进算法和软(ruǎn)件,提高分布式空战任务(wù)自适应规划和态势感知等能力,帮(bāng)助履(lǚ)行(háng)战(zhàn)场管理(lǐ)任务的飞行员进行快速(sù)且(qiě)合(hé)理的决策(cè),以在强对抗环境下更好地执行复杂(zá)作战(zhàn)任务。
- 2016年5月,DARPA向洛马公司授予1620万美元(yuán)的项目第(dì)二(èr)阶段合同,设(shè)计全功能决策(cè)辅助软件原(yuán)型,帮助(zhù)策划有人机(jī)和(hé)无人(rén)机参与的复杂(zá)空战(zhàn)。
- 2018年1月,DARPA已向BAE系统公司授予DBM项目第三(sān)阶(jiē)段合同,前两阶段发展的成果能让有人/无人(rén)机编组在干(gàn)扰环境中飞(fēi)行,具备回避威胁和攻(gōng)击目标的能力。图3是DBM项目的能力验证环境。

图3 “分布式作战管理(lǐ)”能力验证(zhèng)环境
1.3 通信组网
有人平台和无人(rén)平(píng)台(tái)通过通信网络进(jìn)行连接,有人(rén)/无人机协同能力形成(chéng)是(shì)以平台之间的互联互通为(wéi)基(jī)本(běn)前提的。协同(tóng)任务一方面(miàn)对通信(xìn)网络的带宽、时延、抗干(gàn)扰(rǎo)/毁伤、低探测等性能提出了(le)新要求,另一方面(miàn)通信组网应能适应传统平台的异(yì)构网络(luò)以及未(wèi)来新型/改进型网络。
“中平(píng)台间的(de)通信能(néng)力对抗环境中的通信”(C2E)项目通(tōng)过发展抗干扰、难(nán)探测(cè)的(de)通信网(wǎng)络技术,确保(bǎo)在使用相(xiàng)同(tóng)射(shè)频和波(bō)形的飞机之间开展不受限制(zhì)的通信(xìn),以应对各(gè)种频谱战威胁。
DARPA在(zài)2015年发布 “满(mǎn)足任务最优化的动态(tài)适应网络”(DyNAMO)项目,通过开(kāi)发网(wǎng)络动态适(shì)应技术,保证各类航空平台在面对主(zhǔ)动(dòng)干扰(rǎo)时,能在(zài)一定安全等级(jí)下进行即时(shí)高速通信(xìn),C2E项目(mù)的硬件成果(guǒ)被用于(yú)该项目的演示验证,保证原(yuán)始射(shè)频(pín)数据在目前不(bú)兼容(róng)的空(kōng)基(jī)网(wǎng)络之间进行通信,为有人/无人机协同体系中异(yì)构平台之间(jiān)的实时(shí)数(shù)据共享奠(diàn)定了基础。
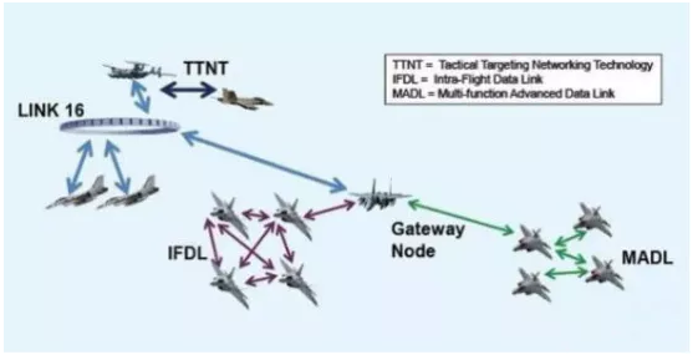
图4 美军现有主要空基网(wǎng)络示意图
1.4 人机(jī)交互
CODE等项目在有人/无(wú)人机协同(tóng)的人机交互上也做了大量工作。此外,美军陆军于2017年(nián)完成“无(wú)人机操(cāo)作(zuò)最(zuì)佳角色分配管理控制系统(SCORCH)”研发(fā)。如图(tú)5所示,“SCORCH”系统(tǒng)包含无人(rén)机的智能自主学习行为(wéi)软件以及高(gāo)级用(yòng)户界面,提供了独特的协同整合能(néng)力,将人机交互、自主性和认(rèn)知科学领域的最新技(jì)术融合到一(yī)套整体(tǐ)作战系统中。系统界面针对(duì)多架无人机控制进行(háng)了优(yōu)化,设(shè)有具备触摸屏交互功能的玻璃座舱、一个配备专用触(chù)摸显示屏(píng)的移动式游戏型手动控制器、一(yī)个辅助型(xíng)目标识别系(xì)统以及其(qí)他高级特性。“SCORCH”负责(zé)多架无(wú)人(rén)机的任务分配,并在达到关键决策点(diǎn)的时候向空中任务指(zhǐ)挥者发出告警,允许单一操作者(zhě)同时有效控制三个(gè)无人机系统并(bìng)浏览它们传回的(de)实(shí)时图像。

图(tú)5 无人机操作(zuò)最佳角色分配管(guǎn)理控制系统(tǒng)
2 有人/无(wú)人机协同关键(jiàn)技术分析
2.1 开放(fàng)式系统架构技术
有人(rén)/无人机协同包含(hán)多种作战(zhàn)平台,如果不同的作战平(píng)台上采用差异较大的(de)技术体制(zhì),将致体系(xì)集成难度剧增。开放式(shì)系统架构正是为了解(jiě)决该问题进行设计的,推动采办和商业(yè)模型远离传统烟囱式开发模(mó)式(shì),具有可移植(zhí)、模块(kuài)化(huà)、解耦合、易升级、可扩展等特点,可(kě)降低寿命周期成本(běn),缩短部(bù)署时间,获得了工业界和国防(fáng)部的支(zhī)持。
目前,美军具有代(dài)表性的开放(fàng)式系统架构有未来机载能(néng)力(lì)环境(Future Airborne Capability Environment,FACE)和开(kāi)放式(shì)任(rèn)务系(xì)统(Open Mission Systems,OMS)。
2.1.1 未来机(jī)载能力环境
美国海军提出未来机载能力环境(jìng)概念,目标是建立一个公共操(cāo)作环境,以(yǐ)支持软件在任(rèn)意(yì)机(jī)载电子系(xì)统上的移植(zhí)和部(bù)署。该思想受到了移动(dòng)设备中使用公共(gòng)操作(zuò)环境所带来优势的启发。FACE通过制定一个严格的开(kāi)放标准集(jí)合,采用开放式体(tǐ)系结构、集成式模块化航空电(diàn)子系(xì)统和模块(kuài)化开放系统分(fèn)析方法,使航空(kōng)电子系统(tǒng)内(nèi)部应用程序之间的互操作性最大化。
未来机载能力环境(FACE联(lián)盟)成立于2010年,旨(zhǐ)在(zài)为所有军用(yòng)机载平台类型定(dìng)义开放的航(háng)空电子环境。FACE技术标准是一种开(kāi)放的实时(shí)标准(zhǔn),用(yòng)于(yú)使安(ān)全关键(jiàn)计算操作更加健壮、可互(hù)操作更强、便携(xié)且安全。该标(biāo)准的最新版本(2017年发(fā)布3.0版本)进一步提升了应用(yòng)程序的互(hù)操作性和可移植性,增强(qiáng)了在FACE组(zǔ)件之间交(jiāo)换数据的要求,包括正(zhèng)式指(zhǐ)定的数据(jù)模型,并强调定义标准的通用语言要求。通过使用标准接口(kǒu),该开放标(biāo)准实现了(le)系统(tǒng)和组(zǔ)件之间的(de)互操(cāo)作性(xìng)以及接口重用。图6是(shì)FACE的软(ruǎn)件(jiàn)架(jià)构,共分(fèn)为(wéi)可(kě)移植组件单元(yuán)、传输服务单元、平台特定服务单元、输入输出服务单元以及操(cāo)作系统单元。
在航空电子(zǐ)系统中使用开放(fàng)标(biāo)准的(de)标准化具有以(yǐ)下几个方面的优势(shì):(1)降低(dī)FACE系统开发和实施成本(2)使用标准接口将(jiāng)导致功(gōng)能的重用(yòng)(3)跨多个FACE系统和供应商的应用程序的可移植性(4)采(cǎi)购符合(hé)FACE标准的(de)产品。 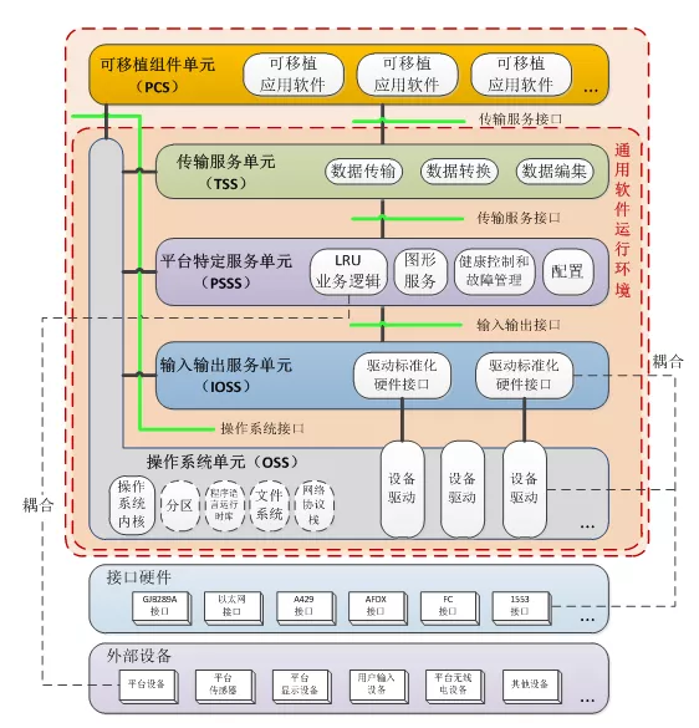
图6 FACE架构(gòu)
2.1.2 开放(fàng)式(shì)任务系统
美国空军发起了开放式(shì)任务系统计划,旨在开发一种(zhǒng)非(fēi)专有的开放(fàng)式系统架构(gòu)。OMS项目由来自政府、工业界和学术界成员组成,正在积极协(xié)调新兴(xìng)OMS标准的制定,包括多(duō)个(gè)机载平台和传感器采集程序(xù),以及(jí)无人机系统(tǒng)(UAS)指挥和控制(zhì)计(jì)划(UCI)和通用任务控制中心(CMCC)。
OMS以及其他OSA工作(zuò)的目标是(shì)确(què)定新的采(cǎi)购和架构方法,以降低开(kāi)发和(hé)生(shēng)命周期成本(běn),同时提供升级和(hé)扩(kuò)展系统功能(néng)的(de)可行途径。由美(měi)国空军(jun1)开发的开放(fàng)式任务系(xì)统(OMS)标准在其定义中利(lì)用商业开发的(de)面向服务的体系结(jié)构(SOA)概(gài)念和中间件(jiàn)。空军(jun1)正在寻求扩(kuò)展OMS标(biāo)准的能力,以促(cù)进航(háng)空电子系统的快速(sù)发(fā)展。UCS OMS参考架构建立了(le)面向(xiàng)服务的基本设计模式和原则(zé)以及关键接口(kǒu)和模(mó)块。航空(kōng)电子系统的(de)功能被(bèi)表征为一组服务(wù)和(hé)一组客户。在某些情况下,程序或系统可以是客户端和服务。OMS标准(zhǔn)定义了客(kè)户端和服务的基本行为以及用于进(jìn)入和退出系统的航空(kōng)电子服务总线(ASB)协议,支(zhī)持测试,容(róng)错,隔离(lí)和身份验证。
在SoSITE项目的最(zuì)新试验中,使用了臭鼬工(gōng)厂(chǎng)开发的复杂(zá)组织(zhī)体开放式系(xì)统架构(E-OSA)任务计算机版(bǎn)本(běn)2(EMC2),即所谓的“爱因斯坦(tǎn)盒(hé)”,如(rú)图7所示。洛克希德(dé)·马(mǎ)丁(dīng)公(gōng)司(sī)开发的E-OSA兼容了美空军(jun1)OMS标准。“爱因斯(sī)坦盒(hé)”可(kě)为系(xì)统之间的通(tōng)信(xìn)提供了(le)安全保护功能,在将相关(guān)能(néng)力部署(shǔ)到(dào)操作(zuò)系统之前,“爱(ài)因斯坦盒”能够确保快速而安全的实验(yàn)。“爱(ài)因斯坦(tǎn)盒”不仅是一个通(tōng)信网关,它可被比作一部智能手(shǒu)机,能够运行很多不同的(de)应用程序,具备实现动态任务(wù)规划、ISR以及电子战的(de)能力。

图7 使用EMC2的美军试验
2.2 无人机控制权限交接
不同无(wú)人机控(kòng)制(zhì)权限交接流程和交接指令差异较大,STANAG 4586通用控制(zhì)标准目前并不涵盖无人机控制权限交接的指令,目前在无人机控(kòng)制权限(xiàn)交接上缺乏(fá)统一的标准(zhǔn)[4,5]。无人机控(kòng)制权限交接指(zhǐ)令主要分成:申请权限请(qǐng)求、释放权限请求、抢权请求、同意、不同意和确(què)认等。
有人/无人(rén)机协同作战在控制权交接(jiē)上可大致分成空(kōng)地交(jiāo)接(jiē)和空空(kōng)交接两种模式。空中不同的(de)有人(rén)机平台之间对无人机控制权限进行交接(jiē),主要发生在(zài)存在有人机加入和退出有(yǒu)人/无人机协同作战体系时,如有人机油料不足(zú)需要返航(háng)或(huò)者(zhě)被(bèi)敌方(fāng)击中,需要将(jiāng)无(wú)人机控制权(quán)限交(jiāo)给其他有人机。有人机与地面(miàn)控制站之间(jiān)对(duì)无(wú)人机的控制权限进行交接,主要发生在执行任(rèn)务前和任务完成后,无(wú)人机(jī)起(qǐ)降过程还需地面控制站作为(wéi)主控方(fāng),另外(wài)当发现(xiàn)无人机出现异常情况,有人机操作不(bú)及时时,也需将无人机控制权限交给地面控制(zhì)站。
2.3 协同任务(wù)分配(pèi)和航(háng)路智能规划
针对有/无人平台(tái)编队协同(tóng)作战任务过程中的任务自(zì)规划、航路自调整、目标自(zì)分配等要求和(hé)特(tè)点[6],利用战术驱动的任务自动分解(jiě)与角色自主分配技(jì)术,在有人机上(shàng)进行(háng)强实时战(zhàn)术(shù)驱动(dòng)的任务(wù)自动(dòng)解算与有人/无人平台(tái)角(jiǎo)色(sè)智能化分配,自主(zhǔ)生(shēng)成多种可行的任务规(guī)划方案,为有(yǒu)人机操作人(rén)员选择最佳方案(àn)提供辅助决策支撑。
如图8所示,利用有(yǒu)人/无人协同(tóng)航路临机规划技术,基于(yú)战场环(huán)境、作战态势(shì)和平台状(zhuàng)态的航(háng)路在线自动(dòng)计算与优化(huà),提供(gòng)多种航(háng)路规划方案。建立任(rèn)务自主分配策略和辅助决策知识(shí)库、航路自规划与(yǔ)自适应飞行控制策略和辅(fǔ)助决策知识库,提高有/无人编队(duì)协同作战的自主化规划(huá)能(néng)力。

图8 协同任务分配和航路智(zhì)能规划
2.4 综合识别和情报融合(hé)
针(zhēn)对不同的有人/无人协同作(zuò)战任务,有人机和无人机携带(dài)的载荷类型(xíng)差异较大,特别是无人机可(kě)携带的载荷包括(kuò)雷(léi)达、可见光(guāng)、红外、多(duō)光谱/超(chāo)光谱、电子侦察等,通常情(qíng)况下无人机同时携带多种类型载(zǎi)荷进行探测,多个(gè)无(wú)人机平台将会采集(jí)大量多源情报数据(jù)。为了提高远距离目标识别的(de)置信度,增强(qiáng)态势感知(zhī)、改善目标检测,提(tí)高精确定位(wèi),提高生存能力,不同平(píng)台多模态传感器(qì)情报的(de)综合识别和融合将会是(shì)有(yǒu)人(rén)/无人(rén)协同的关键(jiàn)技术(shù)之一。目(mù)前,深(shēn)度神经网络在图像/视频的目标检测和识(shí)别领域取得(dé)广泛的应用,比传统方法具有明显优势(shì)。借助人工智能技术,通过对(duì)多源情报数据进(jìn)行综合(hé)识(shí)别(bié)和情(qíng)报融合,形成战场统一态势信(xìn)息,为(wéi)决策(cè)过程提(tí)供快速、精确、可靠的依据。
3 典(diǎn)型作战场(chǎng)景和作战流程(chéng)
以空中预警机为(wéi)例,下面对有人(rén)/无人协(xié)同作战典型作战(zhàn)场景(jǐng)进行介绍。如图9所示,预警机实现有(yǒu)人/无人编队的指(zhǐ)挥控制与引导,由预警机(jī)完成(chéng)信(xìn)息的综合处理(lǐ)、联合(hé)编队的(de)战术决策、任务(wù)管理以(yǐ)及对无人机的指挥(huī)控制,由无人机完成自主飞行(háng)控制(zhì)、战场(chǎng)态势感(gǎn)知以(yǐ)及对(duì)空/地/海目标(biāo)的最终打击[7]。有人战(zhàn)机充(chōng)当(dāng)体系中的(de)通信节点,将有人/无人作战编队嵌入到整个对抗体系中,从而实现战场的信息共享(xiǎng)、可用资源的(de)统一(yī)调度及作战任务的(de)综合管(guǎn)理。

图9 有人/无人(rén)机协同典型作战场(chǎng)景
有(yǒu)人/无人(rén)机协同作战典型作战流程如图10所示,共(gòng)分成任务准备阶段(duàn)、任务执行阶段和任务结(jié)束阶段。
(1)任务准备阶段。
分别完(wán)成对(duì)有人(rén)机(jī)和无(wú)人(rén)机的任务/航路(lù)装订。有人机和(hé)无人机分别起飞,并飞至交接区域,无(wú)人机地面控制站将(jiāng)无人(rén)机的控制权限(xiàn)移(yí)交给有人机,在有人(rén)机(jī)的(de)指(zhǐ)挥(huī)下,共同(tóng)飞往任务区(qū)域。
(2)任务执行阶段(duàn)。
有人机根据当前战(zhàn)场(chǎng)态(tài)势信息,分配各个无人机的作战(zhàn)任务,并对无人(rén)机的航(háng)线(xiàn)和传感器进行(háng)规划。无人机在有(yǒu)人机的指挥下(xià),按照规(guī)划结果执行飞行任务(wù),抵达目(mù)标(biāo)区域(yù)后,传感器开机。有人机上的操作人员对无人机传感器(qì)进行控制,无人机(jī)负责(zé)采集(jí)并回传目标(biāo)情报(bào)至有人机。通过多(duō)源情报综合处理,形成新的态势信息,为有人机(jī)的进一步决策提供依据。
(3)任务结(jié)束阶段。
任(rèn)务执行完成后,有(yǒu)人机指挥无人机抵达交接(jiē)区域,有人机(jī)将(jiāng)无人机(jī)的控制权限移交给无人机地面(miàn)控制站。有人(rén)机(jī)和无人机(jī)执行(háng)各自的任务(wù)或返航。

图(tú)10 有人(rén)/无人机协同典型(xíng)作战流程
4.对有人/无人(rén)机协同领域发展的(de)展望
有人/无人机协同作(zuò)战是未来重(chóng)要的(de)发展方向,在(zài)对当前美军有(yǒu)人/无人协(xié)同项(xiàng)目和关键技术分(fèn)析和理解的基础上,可预见未来(lái)该领域将会逐渐向以下方(fāng)向发展(zhǎn)。
(1)“即来即用”的大规(guī)模(mó)无人机控制
随着未来无人机自主能力不断提(tí)升,只(zhī)在重大决策点需要(yào)人为介入,无人机(jī)操作人员(yuán)控制的(de)无人机数量将大(dà)幅提升。另外,人机交互的手段将越来越丰富,对无人机的控制效率(lǜ)将得到本质改(gǎi)善。有人机通(tōng)过通用指令对不同型(xíng)号(hào)、不同类型的无人机进行控制,无人机的技术(shù)体制和通(tōng)信(xìn)也能够全(quán)面(miàn)兼容,实现有人/无人机协同作战体系中作战平台的无缝进入和离开(kāi)。
(2)情报处理的智能化
针对不同平台、不同传(chuán)感器采集的数据,通过更加智能(néng)化(huà)的(de)手段,对目标进(jìn)行精确检测、识别(bié)、跟踪(zōng),融(róng)合生成统一态势信(xìn)息。
(3)更(gèng)快、更低(dī)成本的体系能力集成
全面采用开(kāi)放式体系架构(gòu),缩短有(yǒu)人/无(wú)人机协同作战能力(lì)集成周期和装备采购成本,同时(shí)将有人(rén)/无人(rén)机的协同作(zuò)战快速扩(kuò)展(zhǎn)到与无人车、无(wú)人船(chuán)和无(wú)人艇的协同,形成更全面(miàn)的体系作战能力。
结(jié) 语
本文深(shēn)入分析了近些年美军在有人/无人机协同领域的项目,提出了有人/无人机协同需要发展的关(guān)键技术,并对有人/无人机协同作战的典型作战场景(jǐng)和(hé)作战流程进行研究,最(zuì)后对有人/无人(rén)机(jī)协(xié)同作战领域未来发展进行了展望,并(bìng)分析了(le)与网络信息体(tǐ)系的关系。
【参考文献】
[1] United States Department of Defense. Unmanned Systems Integrated Roadmap FY2017-2042. Report, 2018.
[2] 李磊,王彤,蒋琪. 美国CODE项目推(tuī)进分(fèn)布式协(xié)同作战(zhàn)发展[J]. 无人系统技术, 2018, (3): 63-70.
[3] 申超,李磊,吴洋(yáng),等. 美国空中有(yǒu)人/无人自主协同(tóng)作战(zhàn)能(néng)力发展(zhǎn)研究[J]. 战(zhàn)术导弹(dàn)技术, 2018, (1): 22-27.
[4] STANAG 4586 Ed.3 Nov 2012, Standard Interfaces of UAV Control System (UCS for NATO UAV Interoperability, NATO Standardization Agency (NSA), 2012.
[5] Mário Monteiro Marques, STANAG 4586 –Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability.
[6] 杨帆,董正宏. 有人/无人平台协同技术与行动模式研究(jiū)[J]. 国防科技, 2018, 39(4): 57-62.
[7] 孙(sūn)晓闻. 无人/有人机(jī)协同探测/作(zuò)战(zhàn)应用研究[J]. 中国电子科学(xué)研究院(yuàn)学报, 2014, 9(4): 5-8.